This post demonstrates how to implement a Kalman Filter in Python that estimates velocity from position measurements. If you do not understand how a Kalman Filter works, I recommend you read my Kalman Filter Explained Simply post.
This example will use two Python libraries. I will use the NumPy Python library for arrays, matrices, and operations on those structures. And I will use Matplotlib to plot input and output data. Assuming these packages are installed, this is the code you will use to import and assign a variable name to these packages.
import numpy as np from numpy.linalg import inv import matplotlib.pyplot as plt
Kalman Filter Refresher
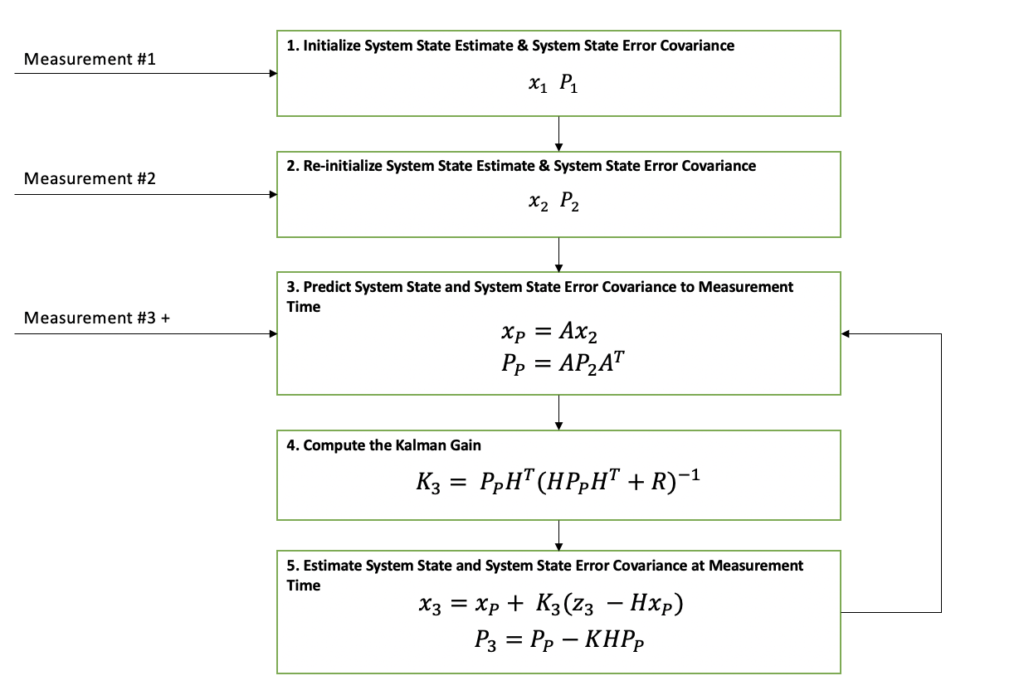
Here is a flow diagram of the Kalman Filter algorithm. Depending on how you learned this wonderful algorithm, you may use different terminology. From this point forward, I will use the terms on this diagram.
Kalman Filter Python Implementation
Implementing a Kalman Filter in Python is simple if it is broken up into its component steps. The component steps are modeled with individual functions. Note that these functions can be extended or modified to be used in other Kalman Filter applications. The algorithm framework remains the same.
Compute Measurements
In order to build and test a Kalman Filter, a set of input data is needed. For this example, the getMeasurement(…) function is used to simulate a sensor providing real-time position measurements of a performance automobile as it races down a flat road with a constant velocity of 60 meters per second.
This function initializes the position at 0 and velocity at 60 meters per second. Next, random noise, v, is computed and added to position measurement. Additional random noise, w, is computed and added to the velocity to account for small random accelerations. Lastly, the current position and current velocity are retained as truth data for the next measurement step.
def getMeasurement(updateNumber):
if updateNumber == 1:
getMeasurement.currentPosition = 0
getMeasurement.currentVelocity = 60 # m/s
dt = 0.1
w = 8 * np.random.randn(1)
v = 8 * np.random.randn(1)
z = getMeasurement.currentPosition + getMeasurement.currentVelocity*dt + v
getMeasurement.currentPosition = z - v
getMeasurement.currentVelocity = 60 + w
return [z, getMeasurement.currentPosition, getMeasurement.currentVelocity]
Filter Measurements
Now that you have input measurements to process with your filter, its time to code up your python Kalman Filter. The code for this example is consolidated into one function.
When the first measurement is reported, the filter is initialized. The measurement is in the following structures. z is the position measurement, R is the position variance, and t is the timestamp of the measurement.

x is the two element state vector for position and velocity. P is the 2×2 state covariance matrix representing the uncertainty in x. T is the timestamp for the estimate.

A is the state transition matrix for a system model that assumes constant linear motion. H is the state to measurement transition matrix. HT is the H matrix transposed. R is the input measurement variance. Q is the 2×2 system noise covariance matrix. Q accounts for inaccuracy in the system model.

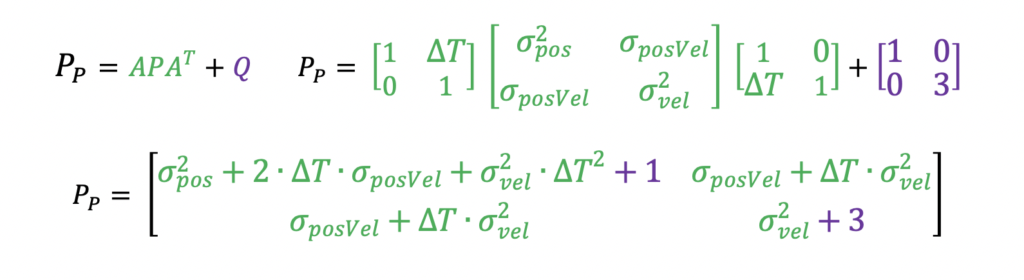
All measurements, after the first one, are filtered into the track state. First, the predicted state, xP, and predicted state covariance, PP, are computed by propagating the existing state and state covariance in time to align with the new measurements.

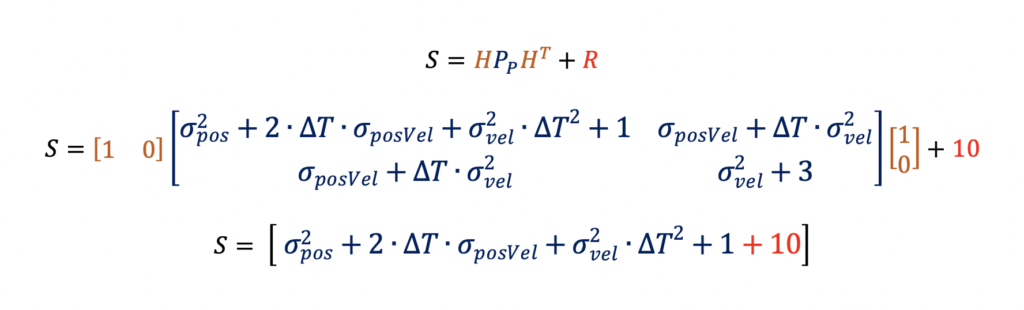
For this example, it is assumed that measurements have a 10/second and therefore a delta time, dt, of 0.1 seconds is used. Next the Kalman Gain, K, is computed using the input measurement uncertainty, R, and the predicted state covariance matrix, PP. This computation was broken down into two steps, first compute the innovation, S, and then compute the Kalman Gain, K, with the innovation.

Lastly, the Kalman Gain, K, is used to compute the new state, x, and state covariance estimate, P.

def filter(z, updateNumber):
dt = 0.1
# Initialize State
if updateNumber == 1:
filter.x = np.array([[0],
[20]])
filter.P = np.array([[5, 0],
[0, 5]])
filter.A = np.array([[1, dt],
[0, 1]])
filter.H = np.array([[1, 0]])
filter.HT = np.array([[1],
[0]])
filter.R = 10
filter.Q = np.array([[1, 0],
[0, 3]])
# Predict State Forward
x_p = filter.A.dot(filter.x)
# Predict Covariance Forward
P_p = filter.A.dot(filter.P).dot(filter.A.T) + filter.Q
# Compute Kalman Gain
S = filter.H.dot(P_p).dot(filter.HT) + filter.R
K = P_p.dot(filter.HT)*(1/S)
# Estimate State
residual = z - filter.H.dot(x_p)
filter.x = x_p + K*residual
# Estimate Covariance
filter.P = P_p - K.dot(filter.H).dot(P_p)
return [filter.x[0], filter.x[1], filter.P];
Test Kalman Filter
Now that you have both the input measurements to process and your Kalman Filter, its time to write a test program so that you see how your filter performs.
def testFilter():
dt = 0.1
t = np.linspace(0, 10, num=300)
numOfMeasurements = len(t)
measTime = []
measPos = []
measDifPos = []
estDifPos = []
estPos = []
estVel = []
posBound3Sigma = []
for k in range(1,numOfMeasurements):
z = getMeasurement(k)
# Call Filter and return new State
f = filter(z[0], k)
# Save off that state so that it could be plotted
measTime.append(k)
measPos.append(z[0])
measDifPos.append(z[0]-z[1])
estDifPos.append(f[0]-z[1])
estPos.append(f[0])
estVel.append(f[1])
posVar = f[2]
posBound3Sigma.append(3*np.sqrt(posVar[0][0]))
return [measTime, measPos, estPos, estVel, measDifPos, estDifPos, posBound3Sigma];
Plot Kalman Filter Results
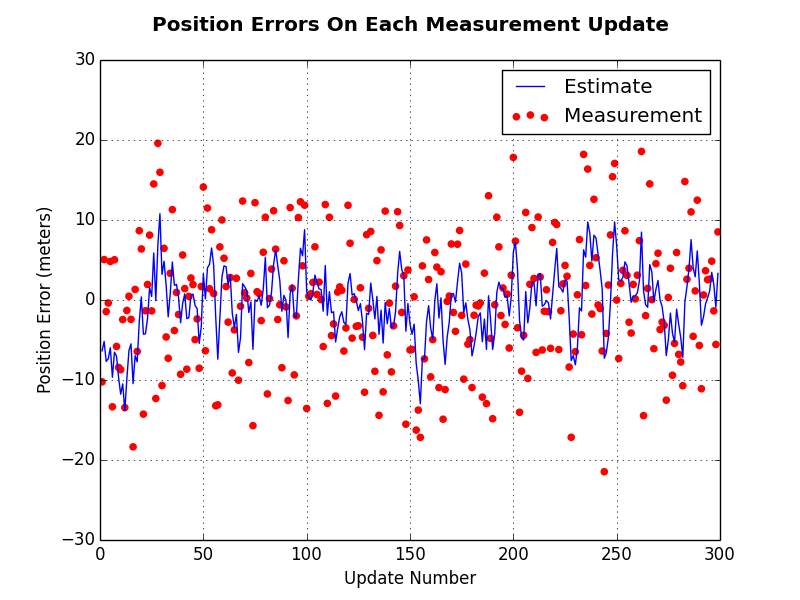
The first plot below shows the position measurement error and estimate error relative to the actual position of the vehicle. This plot shows how the Kalman Filter smooths the input measurements and reduces the positional error.
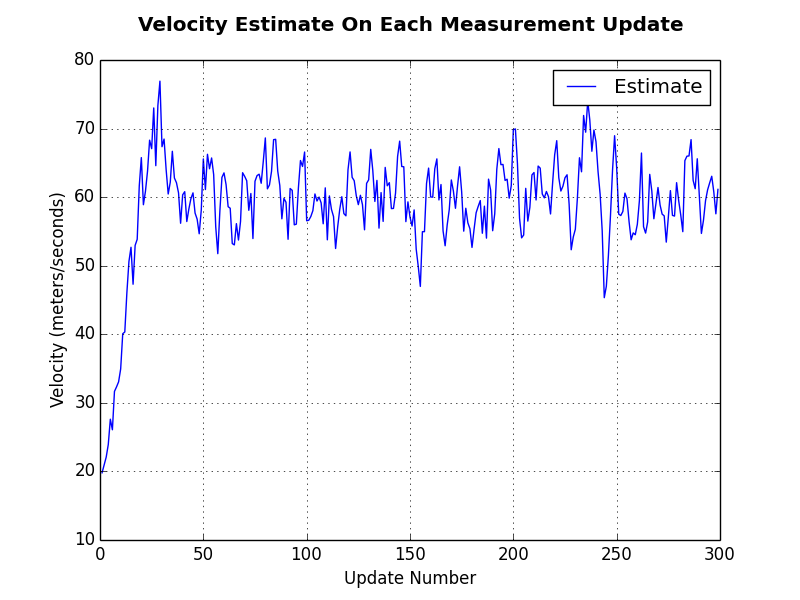
The second plot shows the velocity estimate for the vehicle based on the input measurements. It can be seen that after the first five or so measurements the filter starts to settle on the vehicles actual speed which is 60 meters per second.
The Python code used to create these plots is below. The variables used below come from the functions in the above source code.
t = testFilter()
plot1 = plt.figure(1)
plt.scatter(t[0], t[1])
plt.plot(t[0], t[2])
plt.ylabel('Position')
plt.xlabel('Time')
plt.grid(True)
plot2 = plt.figure(2)
plt.plot(t[0], t[3])
plt.ylabel('Velocity (meters/seconds)')
plt.xlabel('Update Number')
plt.title('Velocity Estimate On Each Measurement Update \n', fontweight="bold")
plt.legend(['Estimate'])
plt.grid(True)
plot3 = plt.figure(3)
plt.scatter(t[0], t[4], color = 'red')
plt.plot(t[0], t[5])
plt.legend(['Estimate', 'Measurement'])
plt.title('Position Errors On Each Measurement Update \n', fontweight="bold")
#plt.plot(t[0], t[6])
plt.ylabel('Position Error (meters)')
plt.xlabel('Update Number')
plt.grid(True)
plt.xlim([0, 300])
plt.show()
Enjoying the article? If you’re thinking about getting a Capital One card, using this referral link helps support the site at no extra cost to you. Thanks!
Analyze Kalman Filter Results
The plots generated by this Python example clearly show that the Kalman Filter is working. Based on your application and use cases, this performance may not be suitable. If it does not meet your requirements that it will have to be tuned. When I say “tuned”, I am referring to adjusting the system model.
If you enjoyed this post, feel free to share it with your friends on social media with the links below! Thanks for reading!
It’s hard to come by experienced people for this topic, but you sound like you know what you’re talking about!
Thanks
I would love to see an example of tuning the system model and how changes to it are derived.
I am looking to model a LEO satellite. I am not sure how my kinematics is modelled in the state transition matrix (STM), which I believe is 9 DOF, x, y, z and their first and 2nd derivatives.
HI Phil, sorry for the delay on this. I have never modeled a satellite. I assume you would have to take into consideration the type of orbit (circular, elliptical). Maybe starting with the Kepler equation and going from there. (https://en.wikipedia.org/wiki/Kepler%27s_equation) I will look for additional resources for you as well. – William
Awеsome article.
Hello. Thank you very much for your very clear explanation.
How can I find the estimated location and velocity from the measured location information I have prepared? In other words, I want to do the calculation without using getMeasurement(). The velocity is unknown. The motion has an initial velocity of 0 m/s and varies slightly with each 0.1s interval (from 0-2 m/s).
The example in this post assumes a filter estimating the position and velocity of system that is traveling at constant velocity.
It sounds like you are working with a system that is starting at zero and accelerating. If the system ends up at a constant velocity state, then this filter should be applicable but it would take multiple measurements to settle and you may need to modify `Q` to allow for the inaccuracy in the system model i.e. the system model assumes a constant velocity but your system has accelerations. This is approach could work if the system accelerations are not too large.
If your system state is going to be accelerating, it may be worth going beyond the filter mentioned here and using a second order filter that estimates the position, velocity, and acceleration. In that case, you would need modify the code in this example to allow for that.